מבצע!
מפל מתק קטן. מבוסס MOSFET
Stepper Motor or DC motor Driver | Board Module
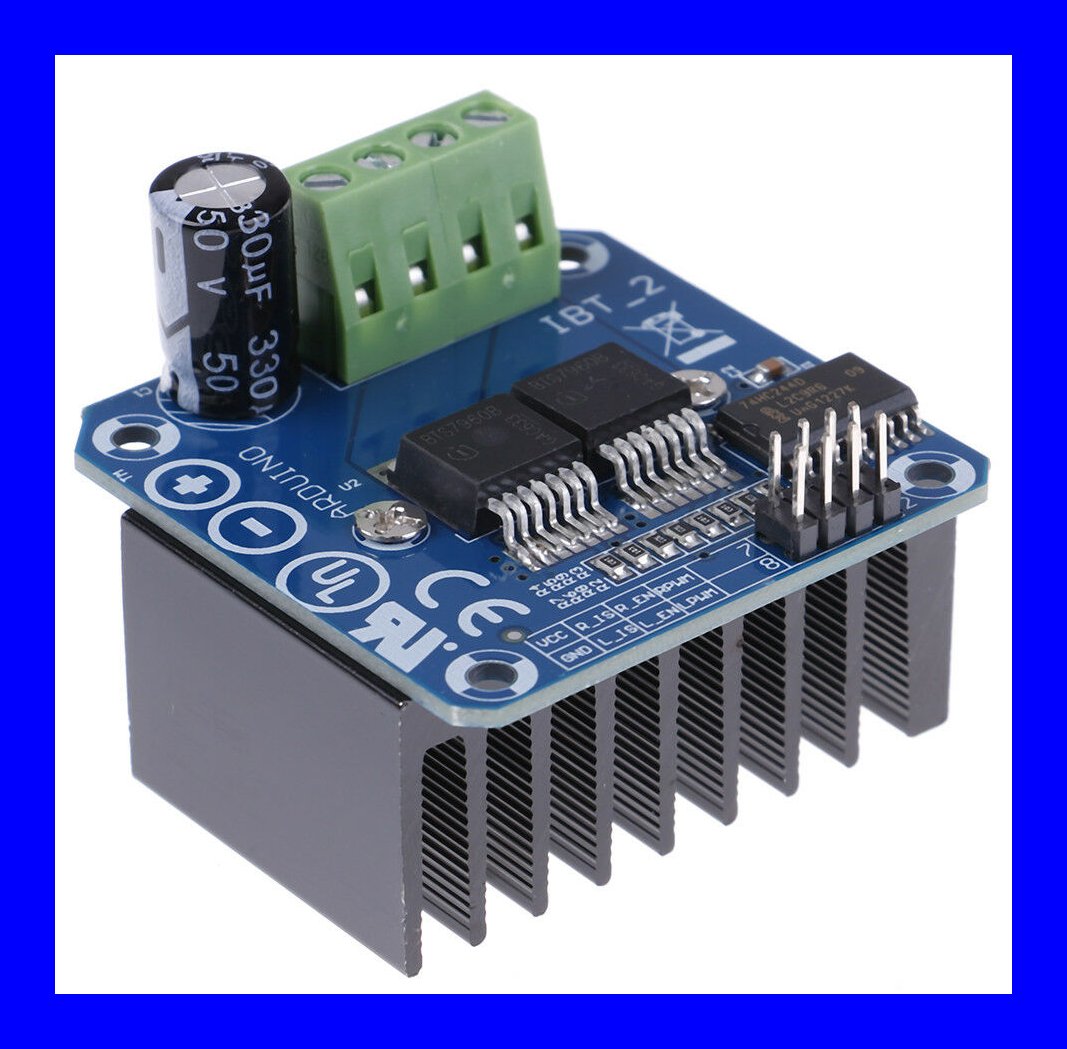
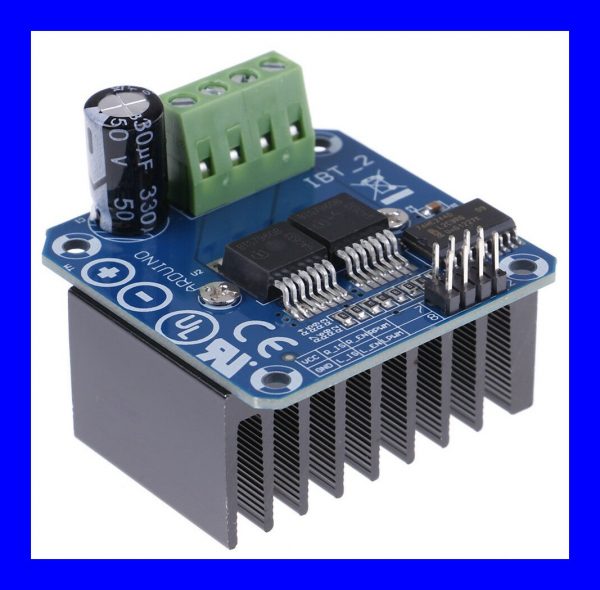
דוחף זרם למנועים | Stepper or DC motor Driver | Board Module Dual H Bridge 43A BTS7960B
המחיר המקורי היה: ₪85.00.₪78.00המחיר הנוכחי הוא: ₪78.00.
10 במלאי (ניתן להזמנה מוקדמת)
תיאור
דוחף זרם למנועים |
צריך 3 יחידות או יותר? בקש הנחה.
מפל מתק קטן. מבוסס MOSFET
BTS7960B DC 43A Stepper Motor Driver H-Bridge
Stepper Motor or DC motor Driver | Board Module
ראו סרטונים על מנועים
להלן סיכום מסודר וברור של כל החיבורים במודול IBT-2 (BTS7960), כולל דוגמה להפעלה לשני כיוונים.
🔌 טבלת חיבורים – IBT-2 (BTS7960)
| פין | סוג | תיאור | לאן מחברים |
|---|---|---|---|
| B+ | כוח | מתח הזנה למנוע (+) | ספק כוח (למשל 12V–24V) |
| B- | כוח | אדמה של ספק המנוע | GND של הספק |
| M+ | יציאה | חיבור למנוע | צד אחד של המנוע |
| M- | יציאה | חיבור למנוע | צד שני של המנוע |
| VCC | לוגיקה | מתח לוגי 5V | 5V (Arduino / ספק) |
| GND | לוגיקה | אדמה לוגית | GND משותף |
| RPWM | קלט | PWM לכיוון אחד | פין PWM במיקרו־בקר |
| LPWM | קלט | PWM לכיוון שני | פין PWM במיקרו־בקר |
| R_EN | קלט | הפעלת צד ימין | HIGH (5V או 3.3V) |
| L_EN | קלט | הפעלת צד שמאל | HIGH (5V או 3.3V) |
| RIS | יציאה | חיישן זרם צד ימין | אופציונלי → כניסה אנלוגית |
| LIS | יציאה | חיישן זרם צד שמאל | אופציונלי → כניסה אנלוגית |
⚠️ דגשים חשובים
-
חייבים GND משותף בין:
-
ספק כוח
-
מודול
-
מיקרו־בקר
-
-
חייבים להזין 5V ל-VCC
-
לא לחבר מתח גבוה ל-VCC
▶️ הפעלת המנוע – לוגיקה בסיסית
כיוון 1 (קדימה)
- R_EN = HIGH
- L_EN = HIGH
- RPWM = PWM (למשל 50% מהירות)
- LPWM = 0
👉 המנוע מסתובב לכיוון אחד
כיוון 2 (אחורה)
- R_EN = HIGH
- L_EN = HIGH
- RPWM = 0
- LPWM = PWM
👉 המנוע מסתובב לכיוון ההפוך
עצירה
- RPWM = 0
- LPWM = 0
או
- RPWM = HIGH
- LPWM = HIGH (בלימה)
💻 דוגמה קוד (Arduino)
#define RPWM 5
#define LPWM 6
#define REN 7
#define LEN 8
void setup() {
pinMode(RPWM, OUTPUT);
pinMode(LPWM, OUTPUT);
pinMode(REN, OUTPUT);
pinMode(LEN, OUTPUT);
digitalWrite(REN, HIGH);
digitalWrite(LEN, HIGH);
}
void loop() {
// קדימה
analogWrite(RPWM, 128); // מהירות 50%
analogWrite(LPWM, 0);
delay(3000);
// עצירה
analogWrite(RPWM, 0);
analogWrite(LPWM, 0);
delay(1000);
// אחורה
analogWrite(RPWM, 0);
analogWrite(LPWM, 128);
delay(3000);
// עצירה
analogWrite(RPWM, 0);
analogWrite(LPWM, 0);
delay(2000);
}
סיכום קצר
- RPWM ו-LPWM קובעים כיוון ומהירות
- R_EN ו-L_EN פשוט "מאשרים" עבודה
- VCC חייב 5V חיצוני
- RIS/LIS הם אופציונליים
![שקע לפלג 6.35mm Mono מונו + אום [למיקרופון]](https://yaharoni.com/wp-content/uploads/2018/01/IMG_20180109_102213-300x300.jpg)


חוות דעת
אין עדיין חוות דעת.